
遙控無人機管理法規自 2020 年正式上路後,整體產業逐步走向制度化與專業化,「操作證考試」也從過去的選擇題,轉變為每一位專業飛手都必須跨越的門檻。其中,多旋翼機高級操作證(G1、G2、G3)更是進入高風險任務、商業應用與專業場域的關鍵資格,其術科測驗不僅考驗飛行技巧,更重視操作邏輯、風險判斷與臨場穩定度。
無論你是準備首次報考,或是多次挑戰仍卡關的飛手,本指南都將協助你建立一套清晰的操作框架,理解每一個動作背後的考核邏輯,從「技術熟練」進一步提升到「考試策略」。最終目標,不只是順利通過測驗,而是讓你具備面對各類任務時,真正符合專業標準的飛行能力。
一、 術科測驗前置作業與應備文件
在踏入考場前,請務必確認以下文件與設備已準備妥當:
1. 必備文件清單(打包下載 : 請點擊這裡下載)
- 小客車體檢表:請至各縣市各級公立醫院辦理小客車體檢並告知需要測夜視功能項目。
- 術科測驗安全同意書:確認了解測驗風險並同意遵守規範(。
- 系統知識填答表:針對應試機型的性能與規格進行填寫。
- 360 度檢查表:建議先行填寫基本資訊,現場配合口述檢查。
- 活動計畫書:模擬實際作業所需的任務規劃。
二、應試機型關鍵要求
在多旋翼機高級操作證(G1、G2、G3)術科測驗中,機型選擇不僅影響操作表現,更直接關係到是否具備應試資格。以下為應試前必須確認的關鍵條件:
操作模式要求 :
無人機術科測驗中,會根據你選擇的考試用途會有不同的操作模式要求
- ⚠️ 若你選擇G1(夜間飛行)或G3(人群上空)用途,則會要求關閉 GPS 輔助,由飛手完全以手動方式進行操控,因此應試機型必須具備「姿態模式(ATTI Mode)」或等效功能。
- 若你選擇G2(農噴.魚釣)用途,則可以「定位模式(GPS Mode)」應試,原因是農噴.魚釣用途的場景較不易受到GPS干擾。
- 若機型無法切換至 ATTI 模式,或無法關閉下視覺定位系統,將無法進行相關考試科目。
機體狀態燈號識別 :
術科測驗中,考官會確認飛手是否具備基本的機體判讀能力,其中包含燈號識別。
- 需清楚辨識不同飛行模式下的燈號狀態
- 例如:部分機型(如 Mavic 系列)在姿態模式下,後機臂燈號會顯示為黃燈
- 飛手需能即時判讀並確認目前飛行狀態是否正確
三、專業基本級考照機型規範
依據民航局於民國 110 年 7 月 19 日修正之無人機管理規則,專業基本級考照機型已納入更明確的重量與尺寸標準。目前可用於專業基本級考照之無人機,主要分為以下兩類:
1️⃣ 專業基本級 I 多旋翼機型
- 重量:2公斤以上,未達25公斤
- 軸距:90~110 公分以上

2️⃣ 專業基本級 II 多旋翼機型
- 重量範圍:25公斤以上,未達150公斤

⚠️ 備註 : 2公斤以下之專業基本級應試機型,不受上述尺寸與重量限制,仍可使用既有機型進行考試。
四、高級操作證分類及測驗項目
| 分類 | 可解禁執行的項目 | 測驗項目 | 時間 |
| 第一組 (G1) | 1. 距地面或水面400呎區 2. 視距外操作 3. 夜間飛行 | 1. 飛行前檢查 2. 設定飛行任務 3. 八字水平圓 4. 燈號識別矩行航線 5. 儀表飛行 6. 執行飛行任務 7. 緊急程序處置 8. 飛行後檢查 | 30分鐘 |
| 第二組 (G2) | 投擲或噴灑物件 | 1. 飛行前檢查 2. 設定飛行任務 3. 八字水平圓 4. 精準軌跡矩行航線 5. 儀表飛行 6. 執行飛行任務 7. 緊急程序處置 8. 飛行後檢查 | 30分鐘 |
| 第三組 (G3) | 人群聚集或室外集會遊行上空活動 | 1. 飛行前檢查 2. 設定飛行任務 3. 八字水平圓 4. 儀表飛行 5. 興趣點環繞 6. 緊急程序處置 7. 飛行後檢查 | 30分鐘 |
三、術科測驗項目
1. 飛行前 360 度檢查
依照檢查表項目依序執行並大聲口述。重點包含:
- 機體結構、螺旋槳(有無裂痕、鎖緊)、電池(電量、安裝穩固)。
- 遙控器訊號、圖傳品質。
- 規格熟記:考官會詢問機型重量、飛行限制等規格。
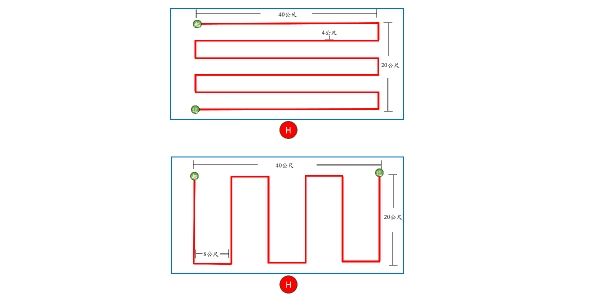
2. 航線任務設定 (G1-G3 差異)
兩張圖卡隨機抽樣,需現場利用 App(如 Litchi, GSPro, DJI Pilot)進行規劃:
| 類別 | 區域大小 | 縱向間距 | 橫向間距 | 作業高度 |
| G1 | 40m x 20m | 4m | 8m | 10m |
| G2 | 20m x 20m | 4m | 4m | 3m(農噴常用設定高度) |
| G3 | 40m x 20m | 4m | 8m | 20m |
⚠️注意:設定任務時需確認 Home 點位置,若飛機執行任務時往後方飛(越過起飛線),會被判定失格。
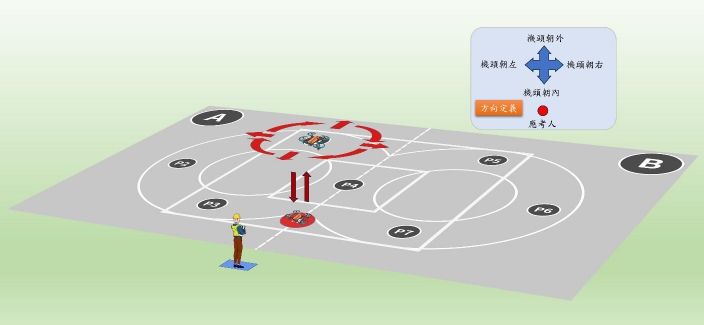
3. 定點起降與四面停懸
- 模式:G1.G3強制以姿態模式 (ATTI) 執行,G2可以定位模式 (GPS) 執行。
- 動作規範:接到監評人員指示後,口述「3、2、1、Go」。機頭朝外自起降點 H 起飛,升至 1~2 公尺高度穩定後懸停 5 秒。隨後進行四面旋轉:機頭順時針轉 90 度(側面朝外)懸停 5 秒、再轉 90 度(機頭朝內)懸停 5 秒、再轉 90 度(另一側朝外)懸停 5 秒、最後轉回機頭朝外懸停 5 秒。降落時需保持機頭朝外,降落回起降點 H 且起落架不得超出標示範圍,完成後口述「結束」。
- 技巧要點:
- 口令清晰:起飛前的倒數與結束時的口誦必須大聲、明確,這是評分的一部分。
- 旋轉穩定:旋轉 90 度時打桿要輕柔,避免產生大幅度的晃動或因操作過猛導致高度落差。
- 降落精度:降落前應微調位置確保起落架完全落入 H 點範圍內,避免因降落偏移導致扣分。
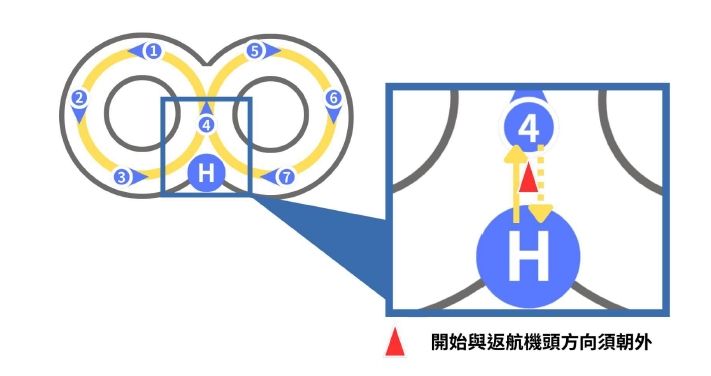
2. 8字水平圓
- 模式:G1.G3強制以姿態模式 (ATTI) 執行,G2可以定位模式 (GPS) 執行。
- 動作規範:接到指示後,口述「3、2、1、Go」,從起降點 H 起飛至約 1~2 公尺高穩定懸停 5 秒。隨後保持機頭朝前,向左前方逆時針繞行 P4、P1、P2、P3、P4 點構成的圓弧一圈;緊接著向右前方順時針繞行 P4、P5、P6、P7、P4 點構成的圓弧一圈。全程需保持平穩飛行,最後返航至起降點 H,機頭朝外懸停並口述「結束」待命。
- 技巧要點:
- 交會點連續性:在中心 P4 交叉點切換左右轉向時,動作需流暢且不可有明顯停頓,維持 8 字型的對稱與連貫。
- 航向同步:機頭必須始終朝向飛行軌跡的切線方向,隨著圓弧曲線不斷微調機頭指向。
- 風偏補償:姿態模式下需透過副翼與升降舵不斷微調,對抗側風引起的航跡偏移,確保圓弧半徑一致。
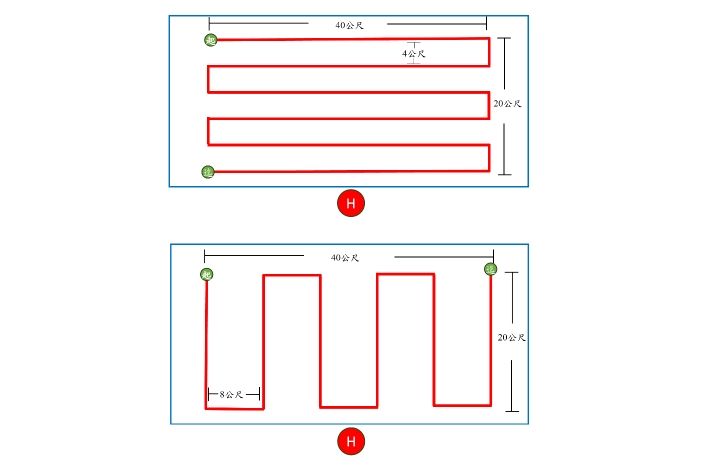
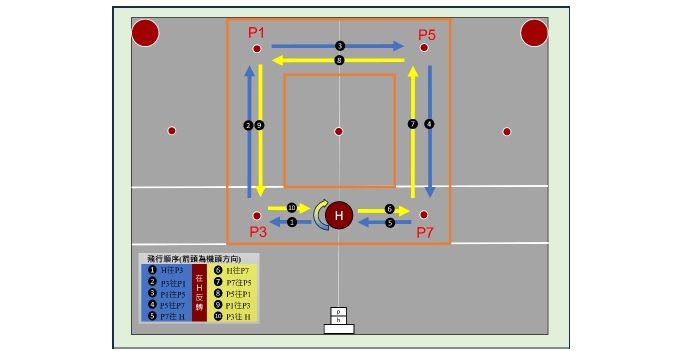
3. 矩形航線
- 模式:G1強制以姿態模式 (ATTI) 執行,G2可以定位模式 (GPS) 執行,G3免測。
- 分類說明:此項目考試規範一樣,G1稱作"燈號識別矩形航線" ; G2稱作"精準軌跡矩形航線"。
- 動作規範:
- 接到指示後,口述「3、2、1、Go」,從起降點 H 起飛至約 1~2 公尺高度穩定懸停 5 秒以上。
- 機頭朝向飛行方向,依序飛行至 P3、P1、P5、P7 點,沿矩形航線順時針飛行一圈,在每個點需穩定懸停 5 秒以上。
- 完成 P7 定點懸停後,飛回起降點 H。
- 接著依序飛行至 P7、P5、P1、P3 點,沿矩形航線逆時針飛行一圈,在每個點需穩定懸停 5 秒以上。
- 完成 P3 定點懸停後,返航起降點 H,保持等高懸停並口述「結束」,靜候指示。
- 技巧要點:
- 航跡精準度:在直線段需精確修正風偏,避免飛機因側風而偏離 P 點連線。
- 轉向配合:轉彎時機頭應與飛行方向一致,確保每個轉角都能精準掠過交通錐上方。
- 高度一致性:在四個定點懸停與長短邊移動時,高度需維持穩定,避免出現鋸齒狀的高度波動。
4. 儀表飛行
- 模式:此項目可選擇定位模式 (GPS) 結合第一人稱視角 (FPV)。
- 動作規範:接到指示後,口述「3、2、1、Go」,機頭朝外起飛至 1~2 公尺穩定懸停 5 秒。隨後切換至定位模式並開啟 FPV,禁止目視航機且操作者需背向場面操作,並依序飛行至 P3、P1、P5、P7 點,每到達定點需根據影像穩定懸停 5 秒。完成 P7 懸停後口述「結束」,並保持等高懸停待命。
- 技巧要點:
- 影像判位:利用 APP 參考線對準地面交通錐,確認定點準確度。
- 高度監控:飛行高度維持 10M,飛行過程中需隨時觀察儀表高度數據。
- 訊號維持:確保影像鏈路與 GPS 訊號暢通,避免操作死角。
5. 任務航點飛行
- 模式:任務模式。
- 動作規範:
- 接到指示後,再次口述「3、2、1、Go」,切換至任務模式。
- 啟動預設之航點飛行任務(自動導航)。
- 任務完成或接到終止指示後,保持懸停並口述「結束」。
- 技巧要點:
- 程序驗證:重點在於驗證應考人設置導航點之功能,需確認航線邏輯與現場環境一致。
- 監控狀態:自動飛行時,手仍需放在遙控器桿位附近,隨時準備應對異常干擾。
6.緊急程序處置 (口試與實作)
當發生異常狀況時,應保持冷靜並參考下表執行處置步驟:
| 異常情境/操作模式 | 處置步驟 (視距內) | 處置步驟 (視距外) |
| 姿態儀異常/飛控系統/電腦失效 | 切換全手動模式(無姿態無定位) → 穩定姿態 → 目視返場 | 切換全手動模式(無姿態無定位) → 穩定姿態 → 參考飛航資訊 → 第一人稱返場 |
| 電子羅盤異常/衛星定位 (GPS) 異常 | 切換手動姿態模式(無定位) → 穩定姿態 → 建立安全高度或避開干擾源 → 目視返場 | 切換手動姿態模式(無定位) → 穩定姿態 → 建立安全高度或避開干擾源 → 第一人稱返場 |
| 慣性導航異常 | 切換手動姿態模式(無定位) → 穩定姿態 → 建立安全高度 → 目視返場 | 切換手動姿態模式(無定位) → 穩定姿態 → 參考飛航資訊 → 建立安全高度 → 第一人稱返場 |
| 酬載影像鏈路異常 | 切換手動定位模式 → 調整天線或方位避開干擾源 → 建立安全高度 → 目視返場 | 切換手動定位模式 → 調整天線或方位避開干擾源 → 建立安全高度 → 參考飛航參數返場 |
| 上傳/下傳鏈路失效 | 切換手動定位模式 → 穩定姿態 → 提升高度避開干擾源與障礙物 → 目視返場 | 切換手動定位模式 → 穩定姿態 → 提升高度避開干擾源與障礙物 → 第一人稱返場 |
| 空中緊急避障處置(任務飛行中) | 啟動防撞系統 → 更新任務避開障礙物 → 目視航機確保無障礙物 → 切換手動定位模式由飛手介入操作 | 啟動防撞系統 → 更新任務避開障礙物 → 參考飛航資訊確保無障礙物 → 切換手動定位模式由飛手介入操作 |
7.飛行後檢查
降落後同樣需依照 360 度檢查表進行關機後的巡檢,確認機體無異常受損,並口誦「考試結束」。

8. 遙控無人機術科高級組測驗示範影片(多旋翼機)
五、無人機術科考照總結與建議
無人機科技大躍進的時代,基本上各廠無人機都以 GPS 定位及人工智慧取向設計。然而,再高科技的產品都有突發狀況的時候,測驗的目的並非刁難,而是驗證飛手的操控技術與緊急應變能力。
要求以「姿態模式」應試,是為了讓飛手熟練成自然,確保在突發狀況下不容易緊張,反而能冷靜做出應變。這就是術科測驗的宗旨:「狀況排除」。
監評考官的嚴格是基於飛行安全第一的考量,但考官通常都有彈性空間。只要操作熟練、表現專業,微小的失誤都是可以溝通與調整的,以下三點重點提供你參考
- 肌肉記憶:姿態模式需要大量練習,它是排除 GPS 突發故障的最有效手段。
- 雲台運用:在任務模式中,適度調整雲台角度(45度或90度)有助於精確判斷目標位置。
- 安全第一:考官重視的是「安全意識」,操作中小失誤尚可補救,具備危險駕駛行為則會直接失格。
祝各位學員順利取得證照,享受安全飛行的樂趣!
延伸閱讀 :